

3.2 Введение в настройку модуля 3.2.1 Инструкция по настройке menuconfig
Для лонгана среды Linux-4.9 войдите в корневой каталог ядра, выполните make ARCH=arm menuconfig (make ARCH=arm64 menuconfig на 64-битной платформе). Войдите в основной интерфейс конфигурации и выполните следующие действия. Для лонгана среды Linux-5.4, вы можете напрямую выполнить ./build.sh menuconfig в корневом каталоге лонгана. Для среды Tina вы можете выполнить make kernel_menuconfig в корневом каталоге, чтобы войти в интерфейс конфигурации menuconfig.
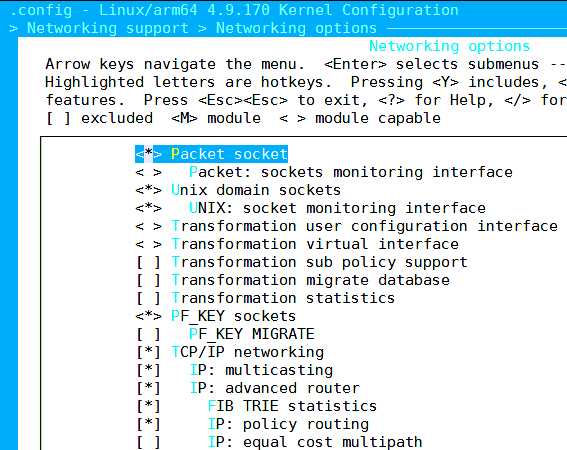
Конфигурация стека сетевых протоколов
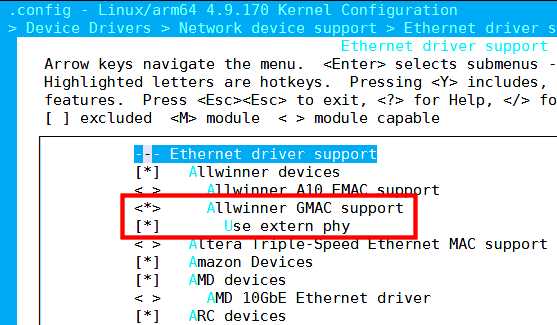
Конфигурация драйвера GMAC
 Примечание. Если используется встроенный PHY SOC, то необходимо выполнить шаги 3 и 4 настройки. В настоящее время встроенный EPHY используют только SOC ТВ-серии и некоторые платформы серии H, например TV303, H3, H6, H313, H616. Для других платформ можно пропустить.
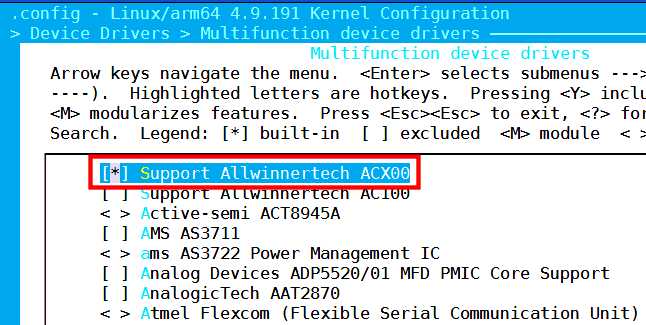
ACX00 внутри SOC инкапсулирует EPHY, поэтому сначала необходимо включить поддержку устройства ACX00: Конфигурация драйвера ACX00
Конфигурация драйвера EPHY
 3.2.2 Инструкция по настройке дерева устройств
Настройте контроллер GMAC в дереве устройств. Один контроллер GMAC соответствует одному узлу устройства GMAC. Конфигурация дерева устройств модуля EMAC находится в каталоге ядра по пути: Конфигурация под ядро linux-4.9 выглядит следующим образом: gmac0: eth@05020000
Свойства в дереве устройств означают: В linux-5.4 конфигурация TWI несколько отличается от конфигурации ядра linux-4.9, разница в основном в синхрогенераторе и dma. gmac0: eth@4500000
gmac_pins_a, gmac_pins_a — узлы дерева для конфигурации выводов EMAC Путь этой конфигурации в lixnu4.9 — arch/arm64 (для 32-битной платформы — arm) /boot/dts/sunxi/xxxxpinctrl dtsi выглядит следующим образом: gmac_pins_a: gmac@0
gmac_pins_b: gmac@1
Примечание. Конфигурация контактов на разных платформах различается. Путь этой конфигурации в linux-5.4 arch/arm64 (32-битная платформа — arm)/boot/dts/sunxi/xxxx.dtsi Дерево устройств выглядит так: gmac_pins_a: gmac@0
gmac_pins_b: gmac@1
Кроме того, clk_gmac0 и clk_ephy_25m являются узлами синхрогенератора В linux-4.9 путь — arch/arm64 (32-битная платформа — arm) /boot/dts/sunxi/XXXX-clk.dtsi Дерево устройств выглядит следующим образом: clk_gmac0_25m: gmac0_25m
clk_gmac0: gmac0
3.2.3 Пользовательский физический уровень AllWinner
Часть SOC AllWinner объединяет AC200 и AC300. AC200 и AC300 имеют внутренний интегрированный EPHY. 3.2.3.1 АС200 ARM связывается с AC200 через TWI, инициализирует EPHY, а затем MAC обращается к EPHY через шину MDIO. Модуль PWM обеспечивает внутреннюю тактовую частоту 25M для EPHY. Общая блок-схема AC200 выглядит следующим образом: 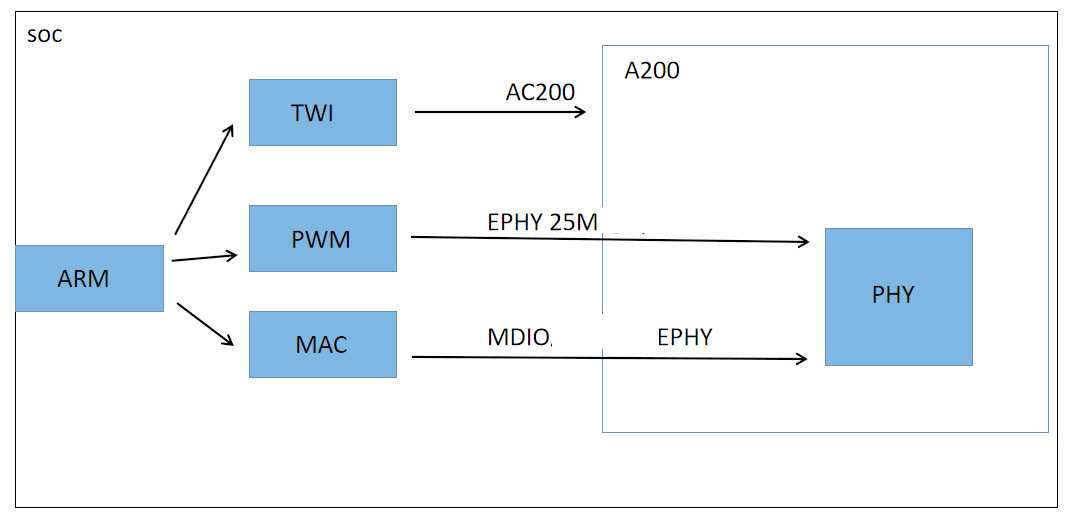 3.2.3.2 АС300 ARM связывается с AC300 через шину MDIO, инициализирует EPHY, а затем MAC связывается с AC300 через шину MDIO. Модуль PWM обеспечивает внутреннюю тактовую частоту 25M для EPHY. Общая блок-схема AC300 выглядит следующим образом: 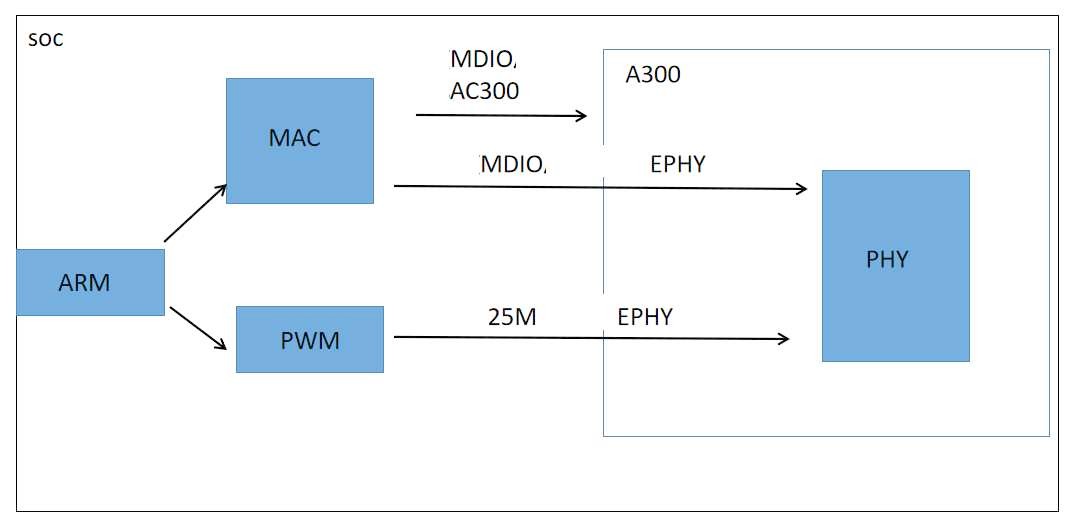 3.2.4 Инструкции по настройке board.dts
3.2.4.1 Конфигурация интерфейса RGMII Для интерфейса RGMII подключается внешний EMAC физического уровня (чип RTL8211F) и используются внутренние синхроимпульсы SOC EPHY_25M, которые поддерживают скорость 10 Мбит/с, 100 Мбит/с и 1000 Мбит/с. Пример конфигурации board.dts выглядит следующим образом: Путь: longan/device/config/chips/{IC}/configs/{BOARD}/board.dts gmac0: eth@05020000
Примечание. Интерфейс RGMII предъявляет строгие требования к фазе сигналов синхронизации и данных, поэтому обычно необходимо настроить параметры tx-delay и rx-delay для обеспечения корректности передачи данных. 3.2.4.2 Конфигурация интерфейса RMII
Для интерфейса RMII используется EMAC внешнего физического уровня (чип RTL8201F), а внешний кварцевый генератор 25M используется для поддержки скорости 10 Мбит/с и /100 Мбит/с. Пример узла дерева устройств board.dts выглядит следующим образом: Путь: longan/device/config/chips/{IC}/configs/{BOARD}/board.dts gmac1: eth@05030000
Для EMAC, использующих встроенный в SOC EPHY, синхрочастота 25M обеспечиваются модулем PWM, поддержка cкорости 10 Мбит/с и /100 Мбит/с. Путь: longan/device/config/chips/{IC}/configs/{BOARD}/board.dts gmac1: eth@05030000
ac200: ac200
В некоторых SOC AC200 инкапсулирует EPHY, связывается с AC200 через TWI, инициализирует EPHY, а затем MAC обращается к EPHY через шину MDIO. В некоторых SOC AC300 инкапсулирует EPHY, связывается с AC300 через шину MIDO контроллера MAC, инициализирует EPHY, а затем MAC также использует шину MDIO для доступа к EPHY. Конечно, конфигурацию дерева устройств можно поместить в конфигурацию дерева устройств ядра или board.dts. При этом конфигурация board.dts переопределит конфигурацию дерева устройств ядра. 3.3 Структура исходного кода GMAC
Исходный код драйвера GMAC находится в папке ядра drivers/net/ethernet/allwinner: drivers/net/ethernet/allwinner/ |
 |