

RU EN Глава 3. Использование Linux: системы Debian/Ubuntu Server и настольная Xfce Страница: 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 3.31.1. Как установить ROS 1 Noetic на Ubuntu 20.04
 Img 3.253
 Img 3.254
 Img 3.255
Обратите внимание, что выполнение следующей команды должно гарантировать, что плата может нормально получить доступ к github, в противном случае будет сообщено об ошибке из-за проблем с сетью. Сценарий install_ros.sh попытается изменить /etc/hosts и автоматически выполнить следующие команды. Однако этот метод не может гарантировать, что github будет нормально доступен каждый раз. Если install_ros.sh выдает следующую ошибку после установки ros1, найдите другие способы разрешить Linux-системе платы нормальный доступ к github, а затем вручную выполните следующую команду:
ОШИБКА: ошибка при загрузке исходников список: время ожидания операции чтения истекло
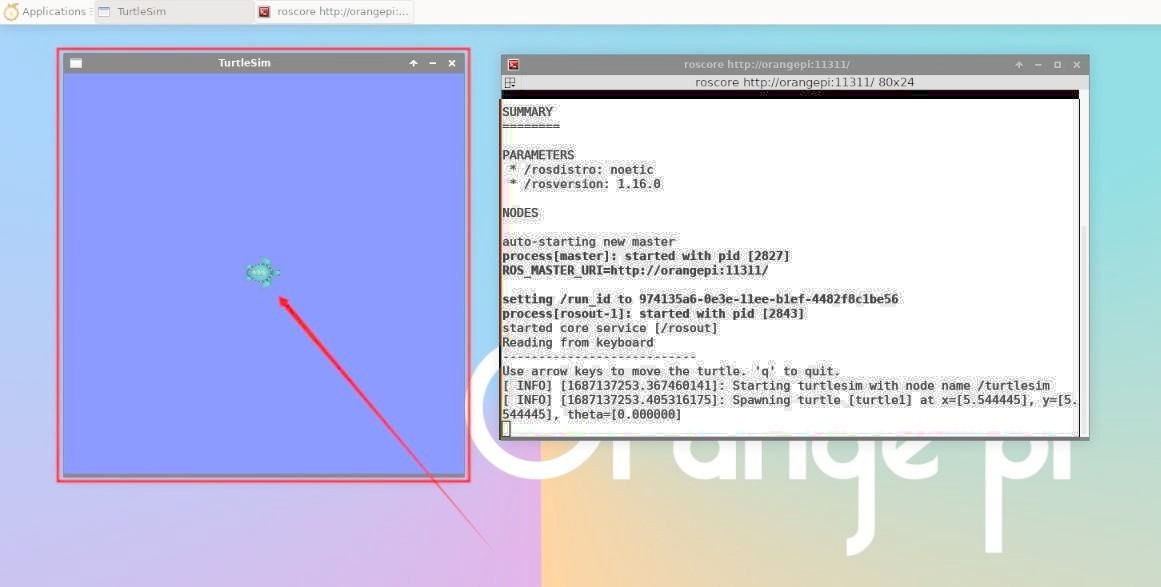 Img 3.256
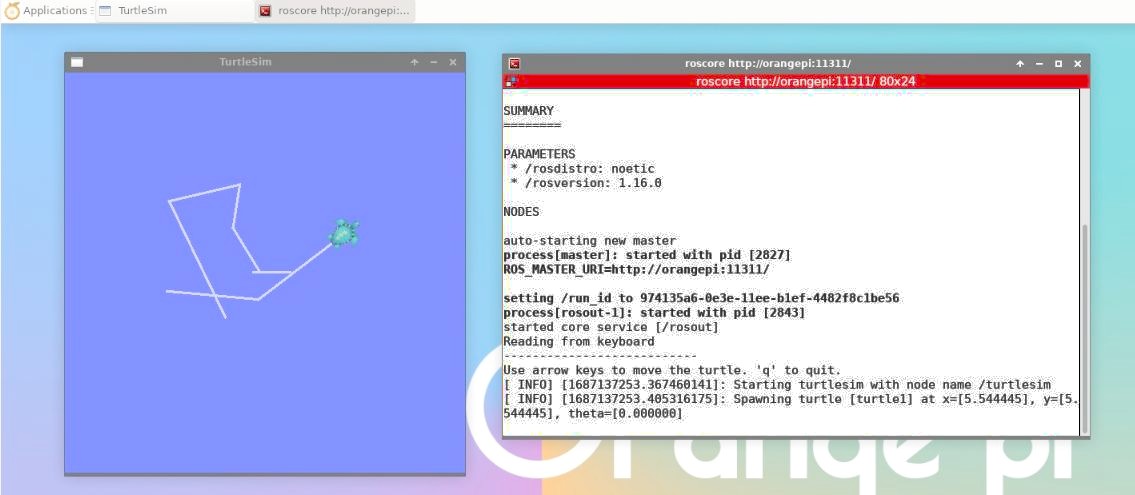
 Img 3.257
 Img 3.258 Страница: 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 |
 |