

RU EN Chapt 3. Instructions for use of Debian/Ubuntu Server and Xfce desktop system Страница: 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 3.31.1. How to install ROS 1 Noetic on Ubuntu 20.04
 Img 3.253  Img 3.254 http://docs.ros.org https://wiki.ros.org/Distributions
http://wiki.ros.org/noetic/Installation
 Img 3.255
Note that running the following command needs to ensure that the development board can access github normally, otherwise an error will be reported due to network problems The install_ros.sh script will try to modify /etc/hosts and run the following commands automatically. However, this method cannot guarantee that github can be accessed normally every time. If install_ros.sh prompts the following error after installing ros1, please find other ways to allow the linux system of the development board to access github normally, and then manually run the following command https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml ERROR: error loading sources list: The read operation timed out
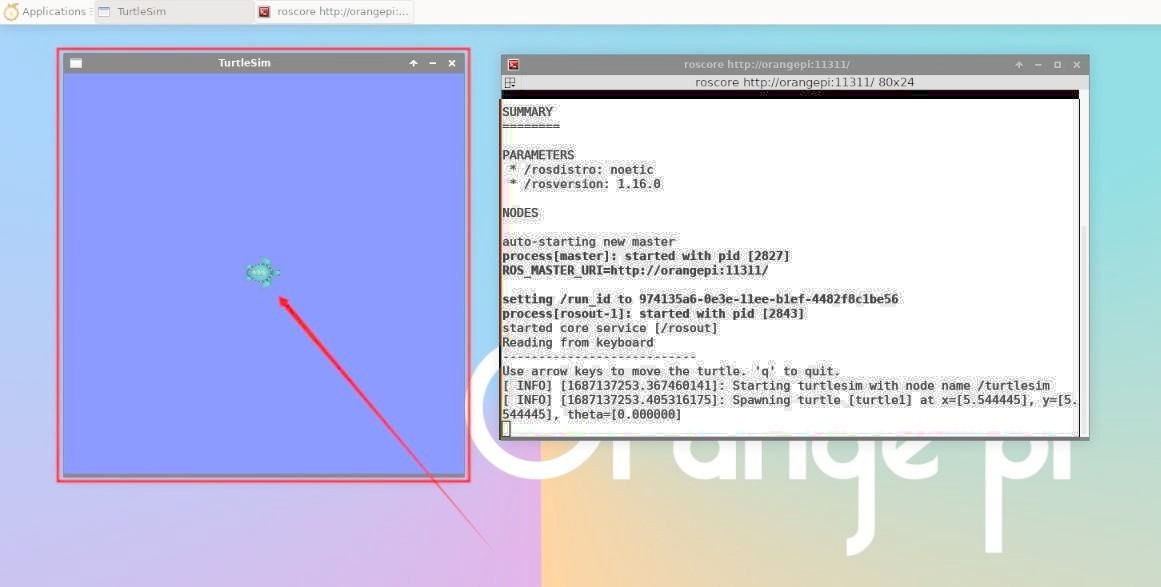 Img 3.256
 Img 3.257
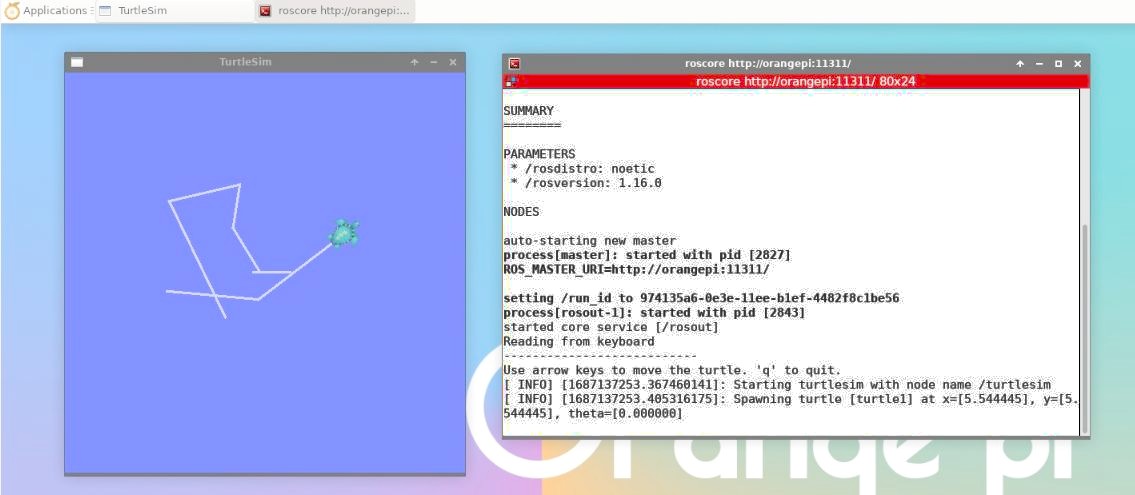 Img 3.258 Страница: 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 |
 |